자율주행의 미래…‘딥러닝’은 어떤 역할을 할까
2018.05.19 11:00 | 노재웅 기자 ripbird@
|
Q.딥러닝이란 정확히 어떤 걸 의미하나.
박민우 책임연구원(이하 박): 한 마디로 정의하면 심층신경망(Deep Neural Network)을 학습하는 행위를 말한다. 여기서 심층신경망이란 입력층(Input layer)과 출력층(Output layer) 사이에 다중의 은닉층(Hidden layer)을 포함한 인공신경망(Artificial Neural Network)을 의미한다. 인공신경망이 2개 이상의 은닉층을 갖는 경우, 신경망이 깊다(Deep)고 표현한다. 이처럼 여러 은닉층을 가진 깊은 신경망을 학습하는 것이 딥러닝이다.
Q.개념이 굉장히 어렵다. 예를 들어 주실 수 있나.
박: 예컨대 개와 고양이 사진이 있다고 가정하겠다. 사람은 사진을 보고 개와 고양이를 쉽게 구별할 수 있지만, 컴퓨터는 그렇지 않다. 이때 컴퓨터가 마치 사람처럼 다른 고양이와 개 사진을 보고 공부해서 개와 고양이를 구분할 수 있도록 하는 기술을 머신러닝(기계학습)이라고 한다. 수많은 데이터를 학습해 사물을 군집하거나 분류하는 법을 익히는 것이 핵심이다. 이중에서도 다량의 데이터로부터 다양한 특징을 스스로 분석하는 인간의 뇌 신경망을 모방한 학습법이 바로 딥러닝이다.
|
박: 딥러닝의 정확도를 위해서는 두 가지 방법이 있다.
첫째, 방대한 양의 대규모 데이터가 필요하다. 데이터 양이 적다면 딥러닝 알고리즘의 성능이 제대로 발현될 수 없다. 사람이 수학문제를 풀 때, 예제를 많이 풀수록 정답을 맞힐 확률이 높아지는 것과 같다.
둘째, 고성능 하드웨어가 필요하다. 딥러닝 알고리즘은 고사양 하드웨어가 좌우한다. 훈련 데이터 양이 많을 뿐 아니라 연산해야 할 변수와 단계가 많아 고속 처리가 필요하기 때문이다. 최근 빅데이터와 고성능 하드웨어가 뒷받침되면서 딥러닝 기술 수준이 급격하게 향상되고 있다.
Q.딥러닝을 자율주행차에 적용한다면 인지, 판단, 제어 세 가지 핵심 영역 중 어떤 분야에 쓰일까.
박: 자율주행의 전 분야에 활용될 수 있겠지만, 현재로서는 인지분야에 주로 활용되고 있다.운전자는 운전시 필요한 정보의 90%를 시각을 통해 확보한다. 자율주행의 인지 영역에 해당한다. 딥러닝은 인간의 시각 영역인 영상 인식 분야에서 높은 성능을 보인다. 딥러닝이 운전자의 눈을 대체할 수 있을 것으로 기대되면서, 자율주행에 딥러닝 적용을 확대하려는 움직임이 커지고 있다. 실제로 딥러닝은 얼굴 인식 기술에서 97.25%의 정확도를 보여 인간의 정확도 97.53%와 거의 흡사한 수준의 성능을 입증했다.
Q.그렇다면 딥러닝은 자율주행의 인지 분야에 어떤 식으로 적용될까. 또 자율주행 성능을 얼마나 향상시킬 수 있을까.
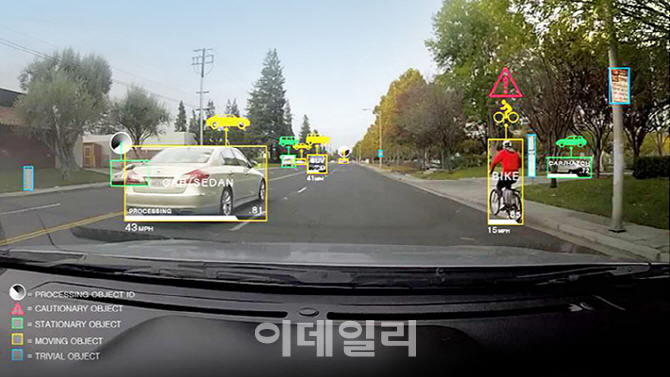
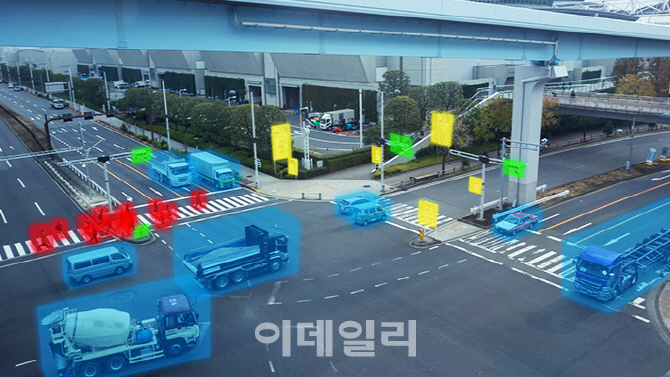
박: 자율주행차에 장착된 카메라에서 취득한 영상을 분석해 자동차/보행자/이륜차/신호등 등의 도로 위 사물을 검출하고 인식하거나, 도로의 차선 및 노면 표시, 자유공간 인식 등에 딥러닝 기술을 주로 사용하고 있다. 이러한 인식 기능은 기존의 서포트 벡터 머신(기계학습의 패턴 인식, 자료 분석을 위한 지도 학습 모델)이나 에이다부스트(기계학습 메타 알고리즘) 같은 기계학습 방식으로도 해결할 수 있는 부분이었으나, 심층신경망을 적용한 딥러닝 기술을 적용하면서 그 성능을 비약적으로 높일 수 있게 됐다.
Q.구체적으로 딥러닝이 자율주행의 판단과 제어 분야에서 어떤 역할을 할 수 있는지 궁금하다.
박: 앞서 설명했듯 인지 영역은 인간의 오감에 해당한다. 주변 물체를 검출하고 도로 환경을 인식하는 역할을 한다. 오감으로 인지한 정보는 뇌로 향한다. 자율주행의 판단 영역에 해당한다. 딥러닝은 영상에서 패턴을 분석해 이상 징후를 사전에 감지하거나 주변 자동차의 움직임을 예측할 수 있다. 판단 영역에 딥러닝을 적용하게 되면 차량의 센서에서 얻어진 정보뿐 아니라, 기존 V2X나 정밀지도 등을 활용해 더욱 안전하고, 정확한 판단을 내릴 수 있게 된다. 뇌에서 판단이 이뤄지면 팔과 다리 등 운동기관을 움직인다. 이것이 자율주행의 제어 영역이다. 딥러닝은 반복학습을 통해 다양한 시도를 할 수 있다. 이를 통해 비보호 좌회전이나 회전 교차로 진입 등 인간도 대응하기 어려운 상황에 대처할 수 있다.
Q.기존 자율주행 개발 방식과 딥러닝 방식의 장단점을 비교 부탁한다.
박: 먼저 인식 성능을 보면, 기존 방식이 인간의 70~80% 수준이지만 딥러닝은 인간 수준의 인식이 가능하다. 다양한 환경을 반영한 대규모 훈련 데이터만 있다면 말이다. 또한, 기존 방식은 예측하지 못한 돌발상황에 대응하지 못한다. 하지만 딥러닝은 돌발상황이 발생하면 기존에 학습했던 유사 상황으로부터 유추해 스스로 판단할 수 있다. 하지만 딥러닝의 한계도 분명 존재한다. 먼저 기존 방식은 개발자가 설계한 규칙에 따라 오류 발생 시 수정이 쉽지만, 딥러닝은 스스로 판단하기 때문에 원인 규명이 힘들니다. 또한, 기존 방식은 낮은 컴퓨팅 파워로도 구동이 가능하지만, 딥러닝은 상용화를 위해 고성능 GPU를 기반한 하드웨어가 필요하다.
Q.딥러닝을 자율주행차에 적용하기 위해서는 어떤 과제를 먼저 해결해야 할까.
박: 세 가지 방법이 있다다.
첫째, 제어기 성능 향상리다. 방대한 양의 데이터를 활용하기 위해서는 빠르고 정확하게 처리할 수 있는 하드웨어가 필요하다.
둘째, 네트워크를 축소하는 것이다. 딥러닝 학습 연산은 대부분 소수점으로 이뤄진다. 당연히 컴퓨터가 처리하는 속도가 더디다. 소수점 연산을 정수 연산으로 바꾸는 작업이 필요하다. 물, 필요 없는 네트워크를 가지치기해서 잘라내는 것도 하나의 방법이다.
셋째, 네트워크를 이원화하는 것이다. 쉽게 말해 큰 네트워크와 작은 네트워크를 두고 많은 데이터로 학습된 큰 네트워크를 사용하여 작은 네트워크를 가르치게 하는 것이다. 이를 Knowledge Distillation(지식 추출)이라 부른다.
Q.현대자동차그룹은 딥러닝을 자율주행차에 적용하기 위해 어떤 연구를 진행하고 있나.
박 : 2015년부터 영상 인식 분야에 딥러닝을 적용하는 연구를 시작했다. 개발된 결과는 실제 자동차에 적용되어 테스트되고 있다. 지금은 본격적으로 딥러닝을 적용하기 위해 차량용 임베디드 제어기에서 다수의 알고리즘들을 동시에 작동시키는 작업을 하고 있는 단계다. 올해부터 나올 차량에는 인식 분야에 딥러닝 기반 알고리즘을 좀 더 적극적으로 적용할 계획이다. 판단이나 제어 분야는 아직 선행연구 단계다. 앞서 말했듯 뜻하지 않은 오류로 인한 사고를 미연에 방지하기 위해서는, 시뮬레이터를 기반으로 한 다양한 연구가 더 필요한 상황이다.
딥러닝은 자율주행 분야에서 중요한 이정표를 만들고 있다. 지금까지 자동차를 고를 때는 디자인, 공간, 성능, 안전, 가격 같은 요소만을 따졌지만, 앞으로는 자동차가 얼마나 똑똑한지가 가장 중요한 기준이 될 것이다. 현대자동차그룹은 가장 똑똑한 자율주행차를 만들기 위해 연구와 개발을 진행하고 있다. 사람처럼 학습하고 행동하는 딥러닝이 바꿔나갈 자율주행 시대, 현대자동차그룹이 선도하겠다.
|
레이싱 모델
인기뉴스




;){kind=link}
많이본뉴스
- 1돈 있어도 못 사는 스포츠카…구매하려면 자기소개서까지
- 2차은우는 차은우…드라마 속 그의 차도 눈이 가요
- 3‘미래의 차’ 테슬라 모델 Y, ‘베스트셀링카’ 된 이유 살펴보니
- 4프랑스 감성 물씬 ‘르노 성수’...성수동 ‘힙’ 플레이스로 뜬다
- 5케이카 "가성비 차량 수요 늘며 르·케·쉐 중고차 인기"
- 6현대차·기아·현대모비스, 북경모터쇼 참가…中재공략 드라이브
- 7'더 뉴 아이오닉5'…"디자인·편의성·승차감 다 좋아졌네"
- 8눈물의 여왕 김수현 벤츠 AMG SL 63 로드스터
- 9한국타이어 '기술력' 자신감 원천…테크노돔·플렉스·링 가보니
- 10현대케피코, EVS37에서 차량 전동화 제어·충전 기술 선봬